

智能力控医疗手术机器人解决方案
思灵机器人自主开发的通用医疗力控机器人,通过高精度关节扭矩传感器检测和适应周边环境, 为插入和螺旋驱动等任务提供作用力/扭矩反馈,以 1000Hz 的控制频率对作用力的接触和精调做出快速反应。
主要应用场景:
骨科、神经外科、腔镜、肠胃镜、穿刺、超声红外诊疗、中医按摩及康复理疗。
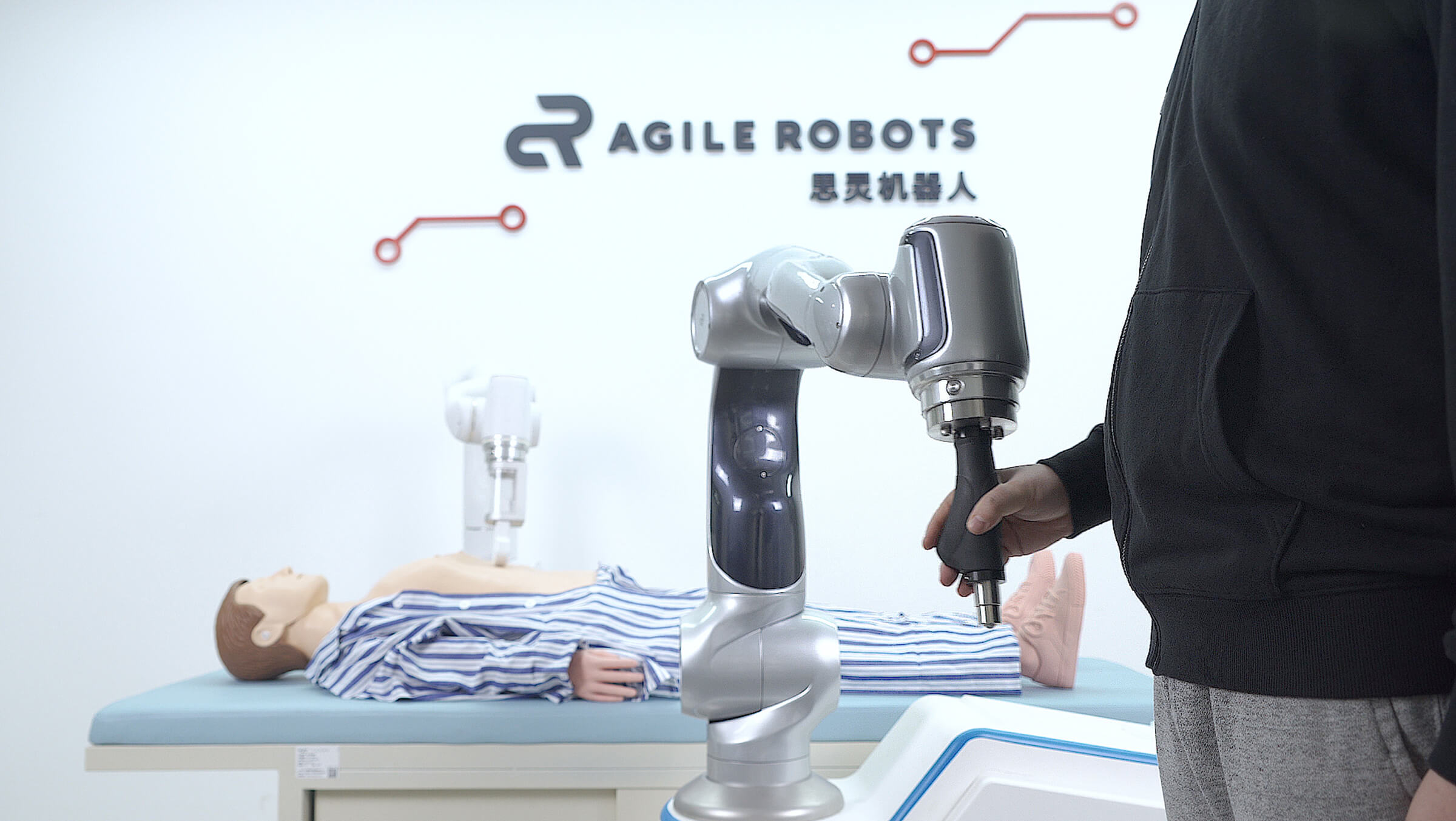
远程遥操作手术机器人
该应用是对手术机器人遥操作系统应用于远程超声诊断的模拟演示,操作者拖动主臂时,远端的从臂会复现操作者的动作,同时操作者能实时感受到从臂所受外力,实现操作者与远端场景的超现实交互。Diana遥操作系统通过高精度运动跟随、实时动态力反馈,构建了真实可靠的远程操作交互,可泛应用于远程医疗、排故救险等领域。同时Diana特色的柔顺控制及虚拟墙等功能进一步确保了操作过程的稳定性与安全性。

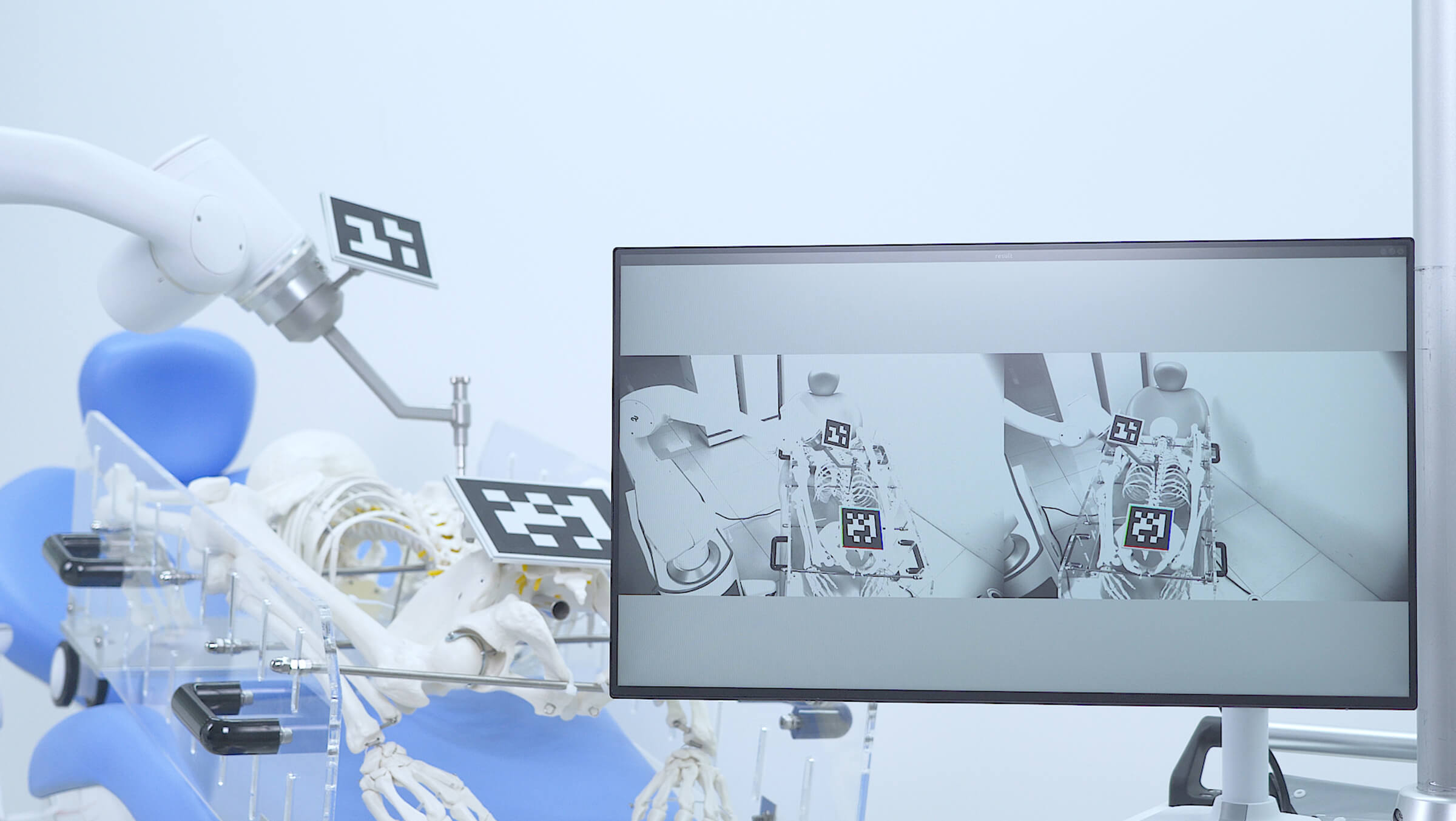
骨科手术机器人
该应用是对骨科手术机器人辅助开展脊柱外科手术的模拟演示。该系统通过双目3D视觉技术识别靶标动态位姿并计算入钉点及钉道,高频率伺服控制机械臂精准地跟随目标运动,以机器人末端配备的引导装置,为医生提供精准稳定的导针置入路径。
- 已与中国骨科手术机器人领军企业签订战略合作协议,已申请 NMPA( 国家药品监督管理局 ) 相关认证。
- 已与国内权威的骨科医院展开科研合作,目前已取得实质性实验进展。
- 已与中国最领先的三甲综合性医院开展介入式手术。
- 已与中国领先的超声机器人公司开展深入合作。
- 已与中国最领先的腔镜手术机器人公司开展深入的合作。
- 已与北京某医科大学展开深入合作,联合开发取穴导航定位系统。
- 已与北京某三甲医院展开深入合作,在按摩康复机器人方向开展研究。












